















 RCCN WeChat QrCode
RCCN WeChat QrCode Mobile WebSite
Mobile WebSite电动机断电后,能使电动机在很短的时间内就停转的方法,称作制动控制。制动控制的方法常用的有二类,即机械制动与电力制动,下面将这两种制动方法介绍如下。
一、机械制动
机械制动是利用机械装置,使电动机迅速停转的方法,经常采用的机械制动设备是电磁抱闸,电闸抱闸的外形结构如图21801所示。
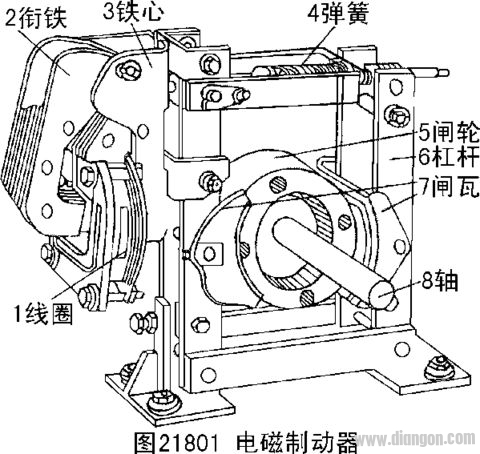
电磁抱闸主要由两部分构成:制动电磁铁和闸瓦制动器。 制动电磁铁由铁芯和线圈组成;线圈有的采用三相电源,有的采用单相电源;闸瓦制动器包括:闸瓦,闸轮,杠杆和弹簧等。闸轮与电动机装在同一根转轴上. 制动强度可通过调整弹簧力来改变。
一)电磁抱闸制动控制线路之一
电磁抱闸制动控制线路之一如图21802所示:
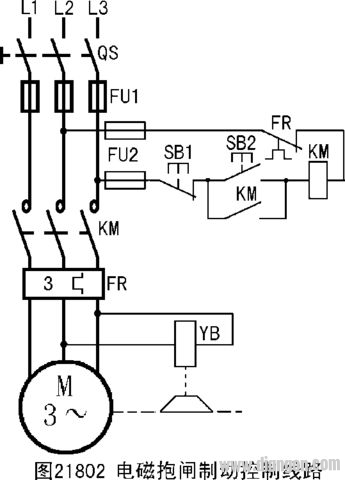
电磁抱闸制动控制线路的工作原理简述如下:
接通电源开关QS后,按起动按钮SB2,接触器KM线圈获电工作并自锁。电磁抱闸YB线圈获电,吸引衔铁(动铁芯),使动、静铁芯吸合,动铁芯克服弹簧拉力,迫使制动杠杆向上移动,从而使制动器的闸瓦与闸轮分开,取消对电动机的制动;与此同时,电动机获电起动至正常运转。当需要停车时,按停止按钮SB1,接触器KM断电释放,电动机的电源被切断的同时,电磁抱闸的线圈也失电, 衔铁被释放,在弹簧拉力的作用下,使闸瓦紧紧抱住闸轮,电动机被制动,迅速停止转动。(http://www.diangon.com版权所有)
电磁抱闸制动,在起重机械上被广泛应用。当重物吊到一定高度, 如果线路突然发生故障或停电时,电动机断电,电磁抱闸线圈也断电, 闸瓦立即抱住闸轮使电动机迅速制动停转,从而防止了重物突然落下而发生事故。
二)电磁抱闸制动控制线路之二
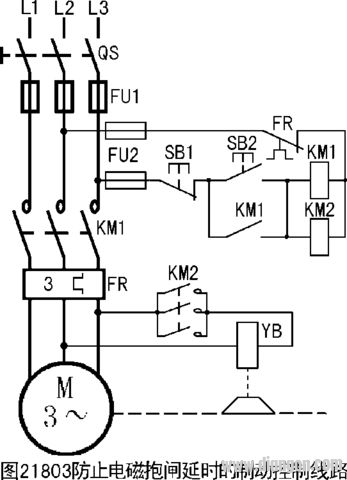
采用图21802控制线路,有时会因制动电磁铁的延时释放,造成制动失灵。
造成制动电磁铁延时的主要原因:制动电磁铁线圈并接在电动机引出线上(参见图2-71)。电动机电源切断后,电动机不会立即停止转动,它要因惯性而继续转动。由于转子剩磁的存在,使电动机处于发电运行状态,定子绕组的感应电势加在电磁抱闸YB线圈上。所以当电动机主回路电源被切断后,YB线圈不会立即断电释放,而是在YB线圈的供电电流小到不能使动、静铁芯维持吸合时,才开始释放。
解决上述问题的简单方法是;在线圈YB的供电回路中串入接触器KM的常开触头。如果辅助常开触头容量不够时, 可选用具有五个主触头的接触器。或另外增加一个接触器,将后增加接触器的线圈与原接触器线圈并联。将其主触头串入YB的线圈回路中。这样可使电磁抱闸YB的线圈与电动机主回路同时断电,消除了YB的延时释放。
防止电磁抱闸延时的制动控制线路如图21803所示。
二、电力制动
常用的电力制动有电源反接制动和能耗制动两种。
一)电源反接制动
电源反接制动是依靠改变电动机定子绕组的电源相序,而迫使电动机迅速停转的一种方法。
(一)单向反接制动控制线路
单向运转反接制动控制线路如图21804所示。
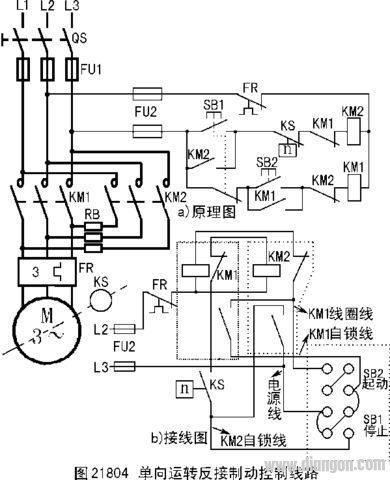
起动时,闭合电源开关QS,按起动按钮SB2,接触器KM1获电闭合并自锁,电动机M起动运转。当电动机转速升高到一定值时(如100转/分),速度继电器KS的常开触头闭合,为反接制动作好准备。
停止时,按停止按钮SB1(一定要按到底),按钮SB1常闭触头断开,接触器KM1失电释放,而按钮SB1的常开触头闭合,使接触器KM2获电吸合并自锁,KM2主触头闭合,串入电阻RB进行反接制动,电动机产生一个反向电磁转矩,即制动转矩,迫使电动机转速迅速下降;当电动机转速降至约100转/每分钟以下时,速度继电器KS常开触头断开,接触器KM2线圈断电释放,电动机断电,防止了反向起动。
由于反接制动时,转子与定子旋转磁场的相对速度接近两倍的同步转速,故反接制动时,转子的感应电流很大,定子绕组的电流也随之很大, 相当于全压直接起动时电流的两倍。为此,一般在4.5KW以上的电动机采用反接制动时,应在主电路中串接一定的电阻器,以限制反接制动电流,这个电阻称为反接制动电阻,用RB表示,反接制动电阻器,有三相对称和两相不对称两种联结方法,图21804为对称接法,如某一相不串电阻器,则为二相不对称接法。
串接的制动电阻RRB的阻值可用下式计算
RRB= KUΦ/Ist(Ω)
式中:RRB为反接制动电阻器的阻值,单位为欧姆(Ω);
UΦ为电动机绕组的相电压,单位为 V ;
Ist为电动机全压起动电流,单位为 A ;
K为系数,如果要求反接制动的最大电流等于全压起动电流,K取0.13;如果要求反接制动最大电流为全压起动电流的一半,K取1.5 。
若反接制动时,仅在两相的定子绕组中串接制动电阻,则选用的制动电阻的数值应为上式计算值的1.5倍。
不频繁起动时,反接制电阻的功率为:
PR= 1/4 In 2RRB(In为电动机额定电流,其单位为A)
频繁起动时,反接制动电阻的功率为:
PR=(1/3—1/2)In 2RRB
例如:一台4极鼠笼型电动机,额定功率为20KW,额定电流为38.4A,额定电压为380V,定子绕组为星接,问采用反接制动时,应串联RRB的阻值和功率为多少?
从机电产品样本上查得IST为228A(若无产品样本,则可取 IST=(4—7)In,一般取中间值)。
RRB =1.5×220/228=1.4Ω
PR=1/3 In 2 RRP =1/3×38.42×1.4=164W
图21804控制回路的接线步骤如下:
(1)首先接FU2和FR:由FR常闭接点引出的线为电源1;由另一个FU2引出的线为电源“2”。
(2)将“1”线分别接在KM1、KM两线圈上;将线圈的另一端接至“对方的常闭触头”上;KM1的空常闭接点与速度继电器KS的常开接点相连接,KS的空接点与KM2常开接点连接,并由刚接过线的KM2常开接点引出“KM2的线圈线”接至按钮SB1右侧常开接点上,从KM2的空常开接点引出两根线,一根为“KM2的自锁线”接至按钮SB1的左侧常闭接点上;另一根接至FU2(即电源线“2”)。
(3)从KM2空闲常闭接点引出一长一短两根导线,短线接KM1的常开接点,长线为“KM1线圈线”接至按钮SB2左侧常开接点;从KM1的空常开接点引出“KM1的自锁线”,接按钮SB2右侧常开接点。
(4)按钮开关中:将右侧的SB1常闭接点与SB2常开接点用导线相连;将左侧的SB1常开接点与常闭接点用导线连接。
(5)将主回路及控制回路的所有连接线全部仔细检查一遍,确认无误后,送电试机。
(二)可逆起动反接制动控制线路
1、电动机可逆起动反接制动的控制线路之一
电动机可逆起动反接制动的控制线路之一,如图21805所示。该控制线路由于主回路中没有限流电阻RB,所以只能用于容量较小的电动机。
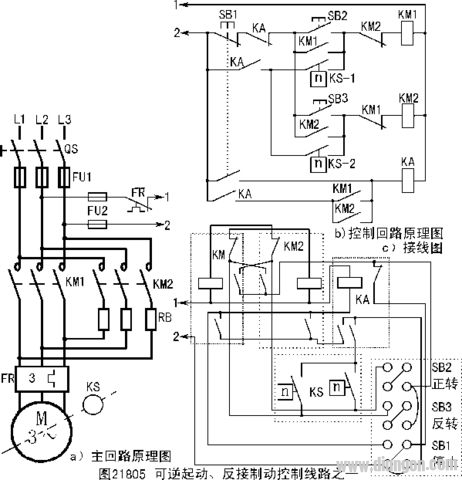
图中KS—1和KS—2分别为速度继电器正反两个方向的两副常开触头,当按下SB2时,电动机正转,速度继电器的常开触头KS—2闭合,为反接制动作准备,当按下SB3时,电动机反转,速度继电器KS—1闭合,为反接制动作准备。中间继电器KA的作用是:为了防止当操作人员因工作需要而用手转动工件和主轴时,电动机带动速度继电器KS也旋转;当转速达到一定值时,速度继电器的常开触头闭合,电动机获得反向电源而反向冲动,造成工伤事故。
图21805控制线路的工作原理,简述如下:
闭合电源开关QS后按SB2,接触器KM1获电闭合并通过其自锁触头自锁,电动机M正转起动,当电动机转速高于120转/每分钟 时,KS—2闭合,为反接制动作准备。
当需要正转停止时,按SB1,接触器KM1断电释放而中间继电器KA获电吸合并自锁;KA的常开触头断开,切断KM2自锁触头的供电回路,使其不能自锁;KA的常开触头接通KM2的线圈回路,使KM2获电吸合,此时反接制动开始,当电动机的转速降至约100转/每分钟时,速度继电器KS—2断开,使 KM2断电释放,在中间继电器自锁回路中的常开触头KM2断开,使中间继电器KA也失电释放。
反转的起动及反接制动的工作原理与上述相似,不再赘述。
可逆起动反接制动的控制线路之一的参考接线步骤如下:
(1)首先接好电源FU2及热继电器FR常闭触头,引出控制电源“1”与“2”。
