RCCN WeChat QrCode
RCCN WeChat QrCode Mobile WebSite
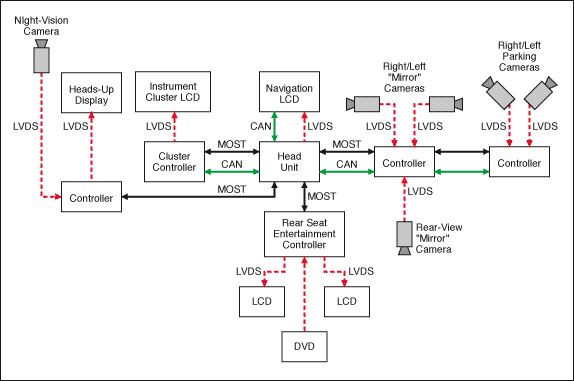
Mobile WebSiteAutomotive networks and controllers are two important components of a car. The controller is equivalent to the brain of a car and is a control component that controls the operation of each part and sends data. The network is equivalent to the nerve of the car and is the wiring of these modules. They need to constantly detect and control cars by receiving and sending data frequently. With the development of the electronics industry and automotive wiring harness industry, the communication between such modules will become more and more frequent. If the CAN bus bus is still used as before, the number of nodes will continue to increase. The structure is too complicated and the cost is too high to adapt. After the popularity of the car.
The car multimedia system is a newly added car auxiliary function, and the protocol category is also relatively simple. For the application of multimedia systems, in addition to protocols mainly used for high-speed data stream transmission, in order to save the cost of the nodes, low-speed protocols are also used for some control functions depending on the transmission signals.
In practical tests, the control unit on the bus system can be used to judge whether this is due to a short circuit caused by the control unit or a short circuit caused by the CAN-High and CAN-Low line connections. If there is a short circuit caused by CAN-High and CAN-Low line connection, the CAN line group must be pulled out from the line node in turn, and the fault location of the bus system is quickly determined by observing the DS01-9 waveform.